國內(nèi)外相關(guān)研究表明��,僅利用相對測量信息即可實(shí)現(xiàn)編隊(duì)航天器的自主導(dǎo)航�。其中�����,航天器間的相對距離信息可通過微波測距或激光測距儀測量得到��,相對視線(LOS)信息可通過光學(xué)相機(jī)測量得到。利用星敏感器提供的慣性基準(zhǔn)�����,將相對位置矢量轉(zhuǎn)換到慣性坐標(biāo)系��,通過對一段時(shí)間內(nèi)的相對位置矢量進(jìn)行連續(xù)測量��,即可確定所有成員航天器的絕對軌道要素�。這種方法需要將測量信息輸入到序貫濾波器中�,從而實(shí)現(xiàn)自主導(dǎo)航,因此需要一定精度的航天器狀態(tài)先驗(yàn)信息����。通常,這一先驗(yàn)信息由地面站或星上其它導(dǎo)航設(shè)備進(jìn)行獲取����。
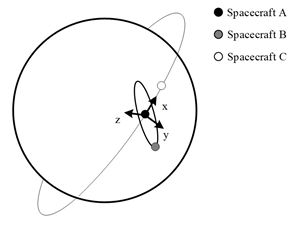
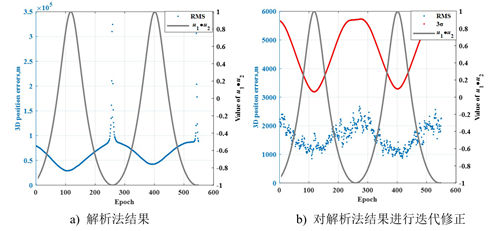
最近,中國科學(xué)院國家空間科學(xué)中心復(fù)雜航天系統(tǒng)電子信息技術(shù)院重點(diǎn)實(shí)驗(yàn)室的鄧麗研究員(通訊作者)與北京航空航天大學(xué)宇航學(xué)院的孫秀聰副研究員合作���,提出了一種僅利用航天器相對位置矢量測量獲取編隊(duì)初始絕對位置的半解析定位方法�。這種方法首先對一段時(shí)間內(nèi)的相對位置矢量測量信息進(jìn)行自適應(yīng)多項(xiàng)式擬合��,提取得到相對引力加速度信息,進(jìn)而將加速度信息代入二體引力場�����,利用解析法求解得到編隊(duì)位置的初始迭代解�����。再將初始解代入高階引力場模型�����,利用高斯牛頓迭代法���,得到編隊(duì)初始位置精確解�����。仿真結(jié)果表明�,對于三星編隊(duì)場景���,在測距和測角誤差分別為1米和5角秒的情況下��,可以實(shí)現(xiàn)2千米的自主定位精度��。
這種方法僅利用相對測量信息�����,無需外部信息輸入即可獲取編隊(duì)航天器的絕對位置��,可以為編隊(duì)飛行任務(wù)提供自主導(dǎo)航支持����,特別是月球軌道編隊(duì)飛行任務(wù)��、深空編隊(duì)飛行任務(wù)等���。該項(xiàng)研究成果發(fā)表在AIAA(American Institute of Aeronautics and Astronautics)旗下的Journal of Guidance, Control, and Dynamics期刊上����。
Citation: Xiucong Sun, Cheng Geng, Li Deng and Pei Chen, “Geolocation of Formation-Flying Spacecraft Using Relative Position Vector Measurements,” Journal of Guidance, Control, and Dynamics, published online 15 February 2022.
論文鏈接:https://arc.aiaa.org/doi/10.2514/1.G006377
圖1. 三星編隊(duì)仿真場景
圖2. 三維位置誤差曲線
?���。ü└澹合到y(tǒng)室)